
![2 Japanese robotics are now gladly getting on an asteroid [Updated]](https://scienceandtechblog.com/wp-content/uploads/2018/09/633/2-japanese-robotics-are-now-gladly-getting-on-an-asteroid-updated.jpg "2 Japanese robotics are now gladly getting on an asteroid [Updated]")
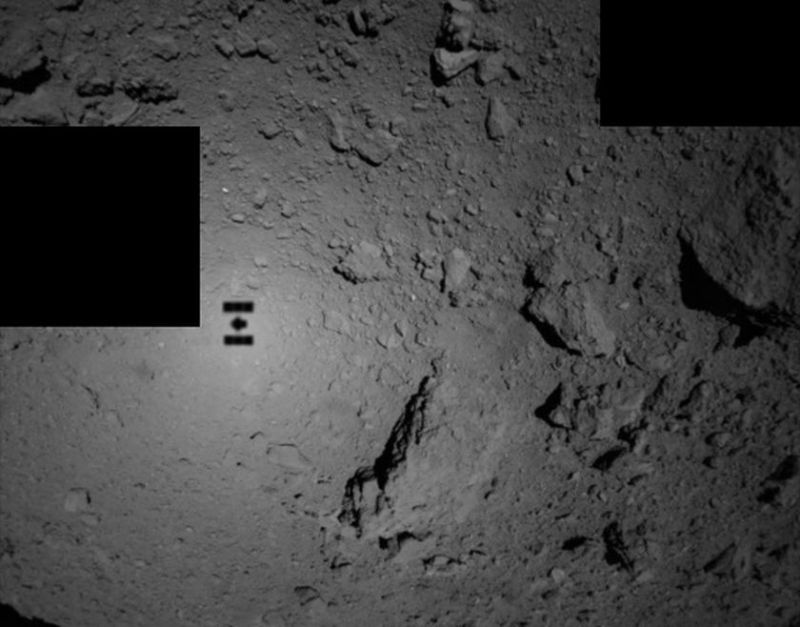
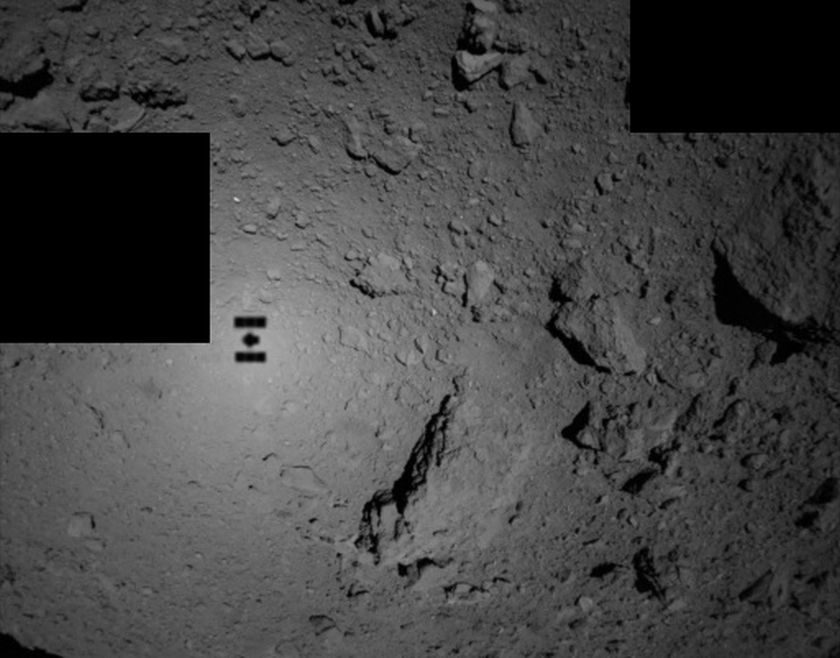
/ The Hayabusa2 spacecraft spies its shadow Thursday night as it comes down towards Ryugu to release 2 little rovers.
JAXA
.
Saturday upgrade: More than 24 hours after they were launched by the Hayabusa2 spacecraft, the Japanese Area Firm has actually lastly supplied an upgrade on the fate of the 2 small robotics launched to fly down to the surface area of the asteroid Ryugu. And they’re doing rather well certainly.
” We are sorry we have actually kept you waiting!,” the area firm, JAXA, tweeted “MINERVA-II1 includes 2 rovers, 1a & 1b. Both rovers are validated to have actually arrived at the surface area of Ryugu. They remain in great condition and have actually sent pictures & information. We likewise validated they are proceeding the surface area.”
Then, they shared some images, consisting of these 2.
This vibrant image was recorded by Rover-1A on September 22 at around 11: 44 JST. It was handled Ryugu’s surface area throughout a hop. The left-half is the surface area of Ryugu, while the white area on the right is because of sunshine. (Hayabusa2 Task) pic.twitter.com/IQLsFd4gJu
— HAYABUSA2@JAXA (@haya2e_jaxa) September 22, 2018
Feeling in one’s bones that 2 small robotics are now hopping happily around an asteroid with practically no gravity makes our own world appear that bit merrier.
Initial post: Japan’s Hayabusa2 spacecraft hasn’t amassed much attention in the western world, however on Friday night the 609 kg car tried something rather fantastic. The spacecraft came down from its station-keeping orbit 20 km above a little asteroid to simply 60 meters, and there it released 2 mini rovers bound for the surface area.
Each weighed just about a kg, and after separating from the primary spacecraft they approached the asteroid called Ryugu. Japanese objective researchers believe the rovers touched down effectively, however are not entirely sure. Interaction with the 2 landers stopped near the minute of goal.
This is most likely since Ryugu’s rotation took the rovers out of view from the Hayabusa2 spacecraft, however researchers will not understand for sure till later Friday (or Saturday early morning, in Japan) when they try to download images from the rovers. And hence we are entrusted a suspenseful scenario.
Testing the rock
Hayabusa2 introduced from Earth back in November, 2014, aboard a Japanese H-IIA rocket, and showed up in the area of Ryugu in June of this year. The ingenious objective will invest the rest of this year and almost all of 2019 at Ryugu. In addition to this rover landing effort, the spacecraft will likewise aim to sample the asteroid and bring a few of the product back to Earth.
This is a bold sample maneuver. It will see the spacecraft release an impactor, which in turn will fire a 10- millimeter projectile with a mass of 5 grams into the surface area. This ought to develop a little crater and, about 2 weeks later on, enable Hayabusa2 to return and gather a beautiful interior sample from the asteroid. If all works out, the spacecraft will leave the asteroid in December 2019 and go back to Earth about a year later on, landing in a remote part of Australia.
Among the functions of Thursday night’s rover landing effort is to collect pictures of and information about the surface area of Ryugu in preparation for the tasting effort. If they made it through the landing, the 2 7cm-tall, cylinder formed rovers will “hop” throughout the surface area and renew their power with solar batteries.
Found in 1999 by astronomers in New Mexico, Ryugu is a near-Earth asteroid that orbits the Sun every 16 months, approximately in between the orbits of Earth and Mars. It determines about 920 meters throughout, and its relative distance to Earth makes it a great prospect for a tasting objective like Hayabusa2.
The spacecraft is so called since of a previous Japanese objective, Hayabusa, that checked out the asteroid Itokawa about a years back. It returned a percentage of product, about 1,500 grains of rock, from the surface area of the asteroid. Hayabusa2 was developed after gaining from the initial objective, and looks for to study its asteroid in higher depth, return a higher quantity of product, and provide insights about the origins of the Planetary system.









{kind=link}